接觸仿真分析的基本原理是什么?(2)
有限元:
2017-05-24 10:05:23
閱讀數(shù):
4691
分享到:
知道了程序如何偵測(cè)接觸的發(fā)生,現(xiàn)在就是要讓程序形成離散化的接觸力學(xué)控制方程���,所以這里我們來(lái)看控制方程的組成��。為了簡(jiǎn)單起見(jiàn)�,我們只考慮沒(méi)有摩擦和粘連的情況��。
上次已經(jīng)說(shuō)了�����,接觸問(wèn)題是一個(gè)對(duì)人類很直觀但是對(duì)機(jī)器很繁瑣的問(wèn)題,其控制方程也不例外���。我們知道固體力學(xué)基于位移的控制方程無(wú)非是下面幾坨:
力平衡方程���;
位移-應(yīng)變方程;
本構(gòu)方程��;
邊界條件���。
在接觸問(wèn)題上��,因?yàn)樵诮佑|面位移和力邊界條件都是未知����,所以以上方程我們要稍作修改�����。以力平衡弱形式為例��,考慮接觸面之后可以寫(xiě)成:

從左到右各項(xiàng)分別描述了內(nèi)力��,接觸應(yīng)力,邊界條件���,和體力對(duì)力平衡的貢獻(xiàn)��。因?yàn)橹豢紤]無(wú)摩擦的情況�����,接觸應(yīng)力項(xiàng)只包括垂直于接觸面的柯西應(yīng)力分量和垂直于接觸面的接觸體距離的變分����。這是平衡方程中唯一因?yàn)榻佑|而添加的項(xiàng)��。
針對(duì)接觸面上的兩個(gè)新的未知量����,數(shù)學(xué)上有兩種途徑來(lái)應(yīng)對(duì):
為新的未知量添加新的約束條件�。
去掉新的未知量,轉(zhuǎn)而改寫(xiě)以上控制方程的形式�。
先來(lái)看1:新的約束條件應(yīng)該只施加于將會(huì)(未激活)和已經(jīng)(已激活)的接觸位置上。直觀地看����,它們大概應(yīng)該是:
接觸體之間的距離不為負(fù)數(shù)(沒(méi)有穿透),距離為零表示接觸激活����;
接觸體之間的接觸壓力不為負(fù)數(shù)(沒(méi)有拉扯)�����,壓力為零表示接觸未激活��;
同一個(gè)位置�����,要么接觸壓力為零(接觸沒(méi)有激活)���,要么接觸距離為零(接觸激活)。
這些直觀的條件��,上個(gè)世紀(jì)初被人發(fā)現(xiàn)是接觸問(wèn)題求解的必要條件�����。今天通常稱為Signorini條件���。雖然看似淺顯���,實(shí)際上因?yàn)榻佑|問(wèn)題可以翻譯為加上了接觸面約束的對(duì)內(nèi)能求變分的約束優(yōu)化問(wèn)題����,所以Signorini條件等價(jià)于優(yōu)化理論上的KKT條件�,身價(jià)一下就高大上了。下次你和人家說(shuō)你知道接觸原理���,不說(shuō)你知道Signorini條件都不好打招呼��。
根據(jù)以上三個(gè)約束條件��,我們可以得出控制方程中第二項(xiàng)(接觸項(xiàng))恒不為正��。把這個(gè)結(jié)論引入控制方程����,我們就實(shí)現(xiàn)了上文說(shuō)的途徑2:把控制方程的形式從等式變?yōu)榱瞬坏仁剑?/span>
所以���,我們得到了接觸問(wèn)題的兩種表達(dá)方式:變分等式方程+Signorini不等式約束,和變分不等式方程����。雖然兩種描述是等效的,但是因?yàn)閼?yīng)用到數(shù)值求解還是等式形式更方便,變分不等式除了在理論和定性分析上然并卵����。
求解加上了不等式約束的弱形式,優(yōu)化理論的很多辦法都用得上�����。最流行的是三種:罰函數(shù)���,拉格朗日乘數(shù)��,和增強(qiáng)拉格朗日乘數(shù)�����。今天最后就說(shuō)說(shuō)罰函數(shù)�����。
罰函數(shù)本質(zhì)上是通過(guò)對(duì)接觸壓力形式的規(guī)定對(duì)Signorini條件提供一種近似�。這種近似假設(shè)接觸面的壓力是這么一種函數(shù)形式�����,這個(gè)函數(shù)滿足:
接觸體距離大于零的時(shí)候函數(shù)值為0;
接觸發(fā)生后��,函數(shù)值隨接觸穿透距離而單調(diào)增加���。
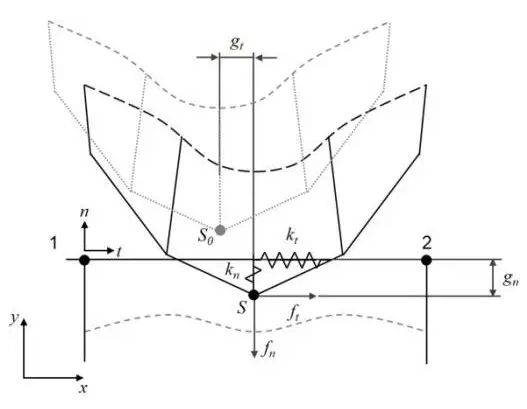
對(duì)比一下上文的三個(gè)條件��,可以發(fā)現(xiàn)這樣的壓力函數(shù)和接觸體距離關(guān)系除了違反“沒(méi)有穿透”的條件��,其他的都滿足�。為了補(bǔ)償穿透的條件��,罰函數(shù)本質(zhì)上給接觸面安了(多)個(gè)彈簧���,來(lái)盡量實(shí)現(xiàn)接觸體的分離��。彈簧的彈性模量由壓力函數(shù)決定�,所以罰函數(shù)法的性能直接決定于這個(gè)函數(shù)的形式�����。罰函數(shù)法是最早應(yīng)用于接觸問(wèn)題的算法����,所以現(xiàn)今所有通用有限元程序都應(yīng)用了它。所以�����,下次答辯或者面試���,有人問(wèn)你接觸方程罰函數(shù)法的原理�����,請(qǐng)穩(wěn)穩(wěn)道出兩個(gè)詞:“Signorini”和"彈簧"����。
下次接著說(shuō)有限元對(duì)接觸方程的離散���。
接觸仿真分析的基本原理是什么?(1)
接觸仿真分析的基本原理是什么?(3)
本文出自深圳有限元科技有限公司官網(wǎng):7zhuan.cn 轉(zhuǎn)載請(qǐng)注明




